

Seattle’s Garden and Glass Museum showcases the magical worlds created by glass artist Dale Chihuly.
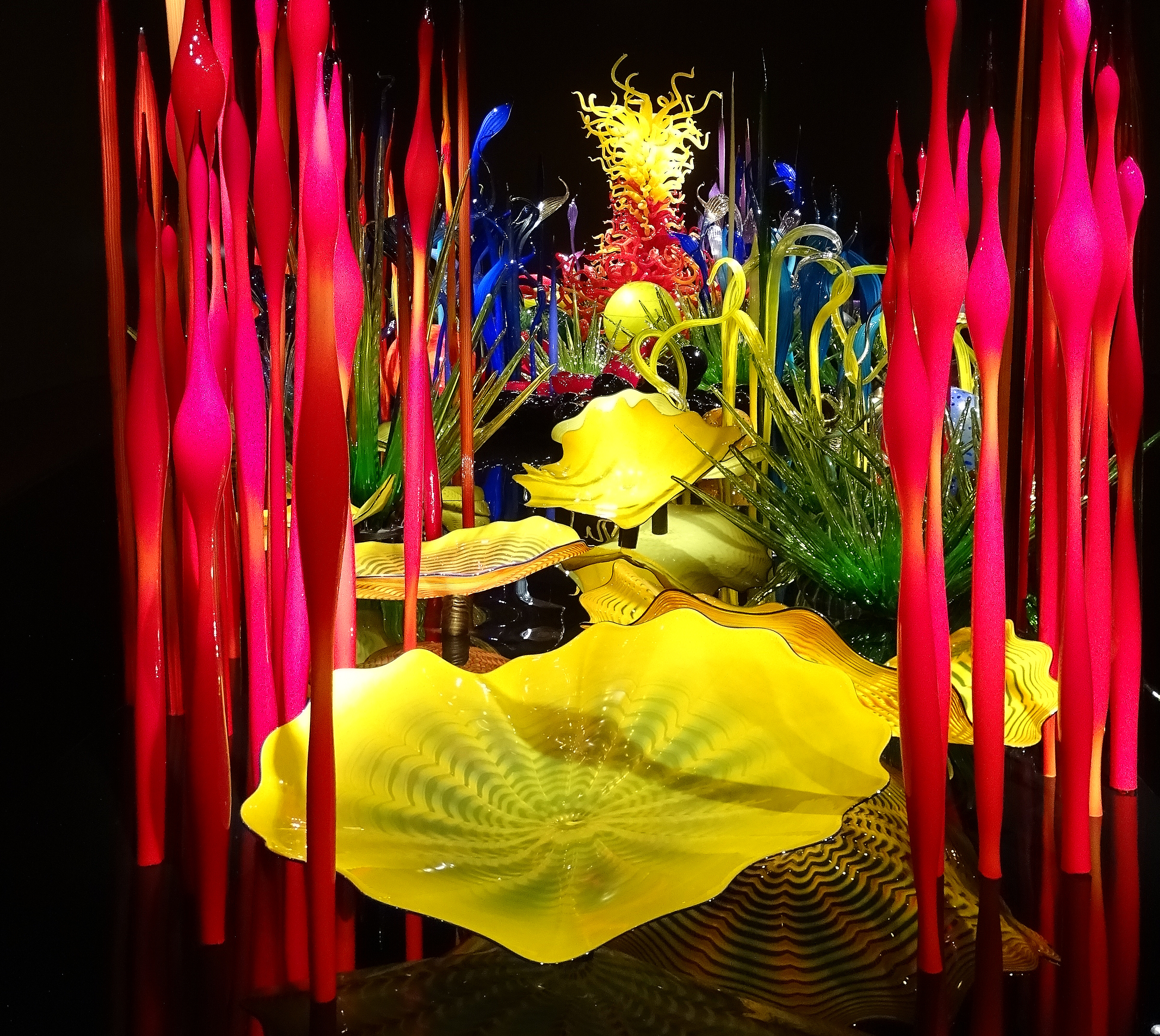
Chihuly creates huge glass wonderlands,

resembling hallucinatory under-seascapes,

full of phantasmagorical deep-sea creatures.

Mirrors create reflective visions like crystalline creatures from outer space.

There are magic mushrooms,

glowing like alien forms,

in surreal secret gardens.

Visiting here one feels much like Alice with a two-way ticket to wonderland!
Cheers to you from the inventive worlds of Dale Chihuly~
Share this:

Discover more from Cindy Knoke
Subscribe to get the latest posts sent to your email.
Cindy, thanks so much for sharing these pictures. They are simply breathtaking!
I am so pleased you enjoyed them & thank you~
WoW! Those look amazing! My kids would love it. 🙂
There are 200 exhibits worldwide so you may possibly find one near you and your kids who I hope are old enough to not break the glass!
They would be careful! I’ll definitely look online and see if some close to Denver! 👌
They sound like nice kids!
They are and thank you! 🙂
<3
It never ceases to amaze me what a master artisan can accomplish on earth. I’d like to know how many artisans were involved in this project.
I would guess a lot due to Dale’s disabilities and the sheer number of his exhibits~
At one time when Tom was moving widely in the ‘glass circle’ (sounds funny doesn’t it) we always talked about disabilities and the part they played in masterful creations. It’s my understanding he can no longer blow from the long pipe required to make the large creations. Tom used 8′ and 10′ pipes for his glass. I was always in awe of his ability and would never pretend to have the ability to have even enough strength to hold the pipe long enough to do all you have to do before putting the pipe down let alone have enough air. Those large pieces require multiple dips into vats of glass and unknown numbers of heating over ‘the glory hole’ before they are spun and beaten into submission. I looked at your pictures carefully as well as Tom. It brought back many memories. It also scares me a bit as Tom has started setting aside certain pieces we have in our home he would like to pass on to others. Of course, I already have MINE marked!
The process is amazing and mysterious. Might Tom be willing to do a post with photographs of some of his pieces? Any explanation of how he made them would be fascinating to readers.
I hear you on the fear factor of people planning special gifts to people when they die, but I have a “letter of intent,” clarifying who I want special items to go too, so I can understand his thinking~
Thus far, Tom has only written one post and that was in response to a post to a post I wrote about the brutality of his father.
His blown glass along with his stained glass is world-wide. I have several pieces of glass I took out of galleries in Carmel when I learned we were moving to DC. Tom always thought photograps of his work in progress would jink his concepts but I have snuck a few here and there. Now I wish I had more.
His photography skills far exceed mine. I hate to compare mine with his in the same sentence. However, I’ll throw out your suggestion and see what he has to say. He now has that ocassional day when he roams around the house as if looking for something to do.
I also have that letter of ‘intent.’ I know from my fathers letter of ‘intent,’ things didn’t go the way Dad wanted. Those extra special people beyond the family will have what I want them to have before I leave this earth and most already do.
Yes, I know the “joy” of families too well! I wouldn’t have a thirty year career if families didn’t treat each other horribly too much of the time. Tom’s brutal father, relatives ignoring letters of intent and operating selfishly, are just the tip of the iceberg, aren’t they, in the myriad ways family members can hurt and damage each other. It is very sad and too prevalent and keeps psychotherapists way too busy.
If we could get Tom to just post some photos of his work on your blog, he might reconnect with his creative talents and they have such healing power. Besides we would overwhelm him with love and appreciation. I know how talented he is and I would love to be able to tell him so directly.
Hugs & love to you too Sheri~
<3 <3
Thanks Cindy. I’ll ask him to start photographing his glass we have here at the house. Today would be a good day for him to photography jewelry [mine needs cleaning] – see I have an alternative motive!
I am very excited about this project. Be sure to alert me when it posts so I don’t miss it!
I will. I’ll plant the seed. Tom has problems with his hands shaking when he’s trying to do things. It’s so frustrating for him as he’s such a perfectionist.
I can well imagine. Shaking hands have to be extraordinarily frustrating for a glass artist and I understand being perfectionistic. So, sorry Sheri. I hope he feels like he still can share with us, because we won’t see the flaws that he does, we will only see the art & beauty coming from his perfect heart. <3
Notice the shrinking space allowed for our discussion as it goes on! SO annoying WP!
Bad, Bad – I’m long winded and know it!
It is NOT you! It is WP! They did this with my friend who is having a bone marrow transplant now and blogging about it. I think they do it to limit discussion and it annoys the heck out of me. How dare they limit discussions! I love them!
I love discussions as well. That’s the heart of blogging as far as I’m concerned. We get Tom’s results of the endo tomorrow and are on pins and needles. Hope you are well and taking dynamite pictures. You have such a gift.
I agree with you about discussions and relationships being the heart of blogging. We cast our nets upon the internet and find kindred souls. Holding and sending prayers regarding Tom’s results~ <3
Beautiful. I love Dale Chihuly’s work and have visited his displays all across the US.
Oh how wonderful! Lucky you~ <3
Well done. Stunning work brilliantly presented.
Awww, thanks much Nicci & cheers to you my friend~ <3
Wow! Those are incredible! They must have taken years to make!
He has a staff now that he supervises because he is partially blind, but I am sure the labor is intensive!
Cindy, your photos of Chihuly’s creations are every bit as artistic and magical as the works themselves! Stunning!
Oh, that is incredibly thoughtful and most motivating. You are a very kind friend! <3 <3
Wow! Some of the glasswork looks similar to work that is on display in the Bellagio Hotel in Las Vegas and in the Gaylord Opryland Resort in Nashville. I wonder if it’s the same artist? Beautiful photos!
I know the Bellagio is Chihuly and Nashville has several exhibits. Check out: http://dishmag.com/issue116/lifestyle/13333/blown-away-glass-master-chihuly-takes-nashville/
Are you sure you’re in Seattle ??? This looks like some kind of science fiction fairyland, Cuz……., but it sure is beautiful. 🙂
We are back at The Holler now and it was a science fiction fairlyland! You would love seeing it cuz! <3
schönes Wochenende wünsche ich
Vielen dank mein leiber Freund und Frohe Whochenende! <3
I am happy to say I have visited this museum twice, and I know I will go back. Your photos of his exemplary work are fantastic, Cindy; you do this master great justice.
Oh, I am honored. You are a lovely friend and a kindred traveling and photographing spirit! <3 <3
The colors are stunning. I have yet to make it to that museum. Great photography!
Thank you! It definitely is worth a visit.
What a Strange beauty!
Agreed~
This museum will be at the top of my list the next time we visit the west coast. Absolutely amazing! Anita
Oh, I can’t wait to read your post about it & cheers to you Anita!
Incríveis essas cores! Luz e brilho perfeitos!
Você é a alegria de saber virtually!
https://az616578.vo.msecnd.net/files/2016/04/01/635951507046266515-998003258_superthumb.png
Olá Cindy! Agora também acompanho seus trabalhos pelo Facebook. Estou adorando!
Oh maravilhoso. Vou olhar para você no FB! <3
Now, there is some colorful yard-art!
Oscar
In my old house with a HOA the neighbors would complain, at The Holler the birds would love it!! Much better at The Holler!
Would love to visit there! Your photos bring them to life! We have one of his large piece on permanent display at our local museum. Cannot imagine seeing so many in one place.
There are about 200 exhibits worldwide. Maybe you can find one closer to you!
Quite impressive. One of his pieces, Cathedral Violet Chandelier, hangs in a brightly sunlit, open stairwell at the Daum Museum.
http://www.daummuseum.org/photo-gallery/#!
Oh yes, it looks distinctly familiar. Wonderful! Love the color~
A visit to the glassy wonderland!
Yes, and one must be careful in this fragile wonderland! <3
Wow!
He is a WOW kind of artist!
Just incredible, isn’t he? Fabulous shots! 🙂
Yes, he was, and still is, quite unique~
Bookmarking this particular article. Gian is going to write a book of original, contemporary fairy tales (his lifelong dream actually). We are going to use this as inspiration for our fantasy world Etherea.
I love the name Etherea! Reminds me of the island of Eleuthra but more ethereral. Perfect & I look forward to reading this!
Wowza these are brilliant, what a great museum, I’ve been brought up with an appreciation of glass art my Mum loves it but these are something else. Those glass spikes would look great lit up in the garden.
You have an artists eye. Check out the glass at night:
https://www.google.com/search?q=chihuly+glass+garden+at+night&rlz=1C1CHWA_enUS668US668&source=lnms&tbm=isch&sa=X&ved=0ahUKEwiewsn_mIPQAhVKlVQKHTr2BqIQ_AUICCgB&biw=1280&bih=600
PS- Just noticed the third image is mine. Woo Hoo!
Congrats, I’m not surprised your photos are amazing!
<3
Stunning!
You are a sweetheart and your thoughtfulness is appreciated! <3
💗
I like a fool passed an opportunity to purchase a Chihuly piece on sale at the Boca Raton Museum for only $2500.00. I am still kicking myself almost 20 years later. I love his art work in glass.
Thank you for sharing.
Thank you for the like,Cindy.: 🙂
<3
Definitely want to get to Seattle to see this. Chihuly is amazing! I’ve seen his works in the least likely places, and it’s always spectacular!
His work is all over the world and I am glad you have seen it!
Thank you for the like, Cindy. 🙂
His work is stunning and instantly recognisable!
Yes, because he is distinctive and unique! Thank you~
Hello,
I’ve nominated you for the Mystery Blogger Award
If yours is an award free blog you are certainly under no
obligation to act on the nomination.
Please accept the award with my compliments!
Rob Goldstein
I am award free, but am honored by your thougthfulness Robert and so grateful to have met you here in blogdom. Thank you for your thoughtfulness and keep posting your important and valuable posts. You have a fan in me~
Thank you — I appreciate that. You have an extraordinary talent.
<3 <3